Hey Guys,
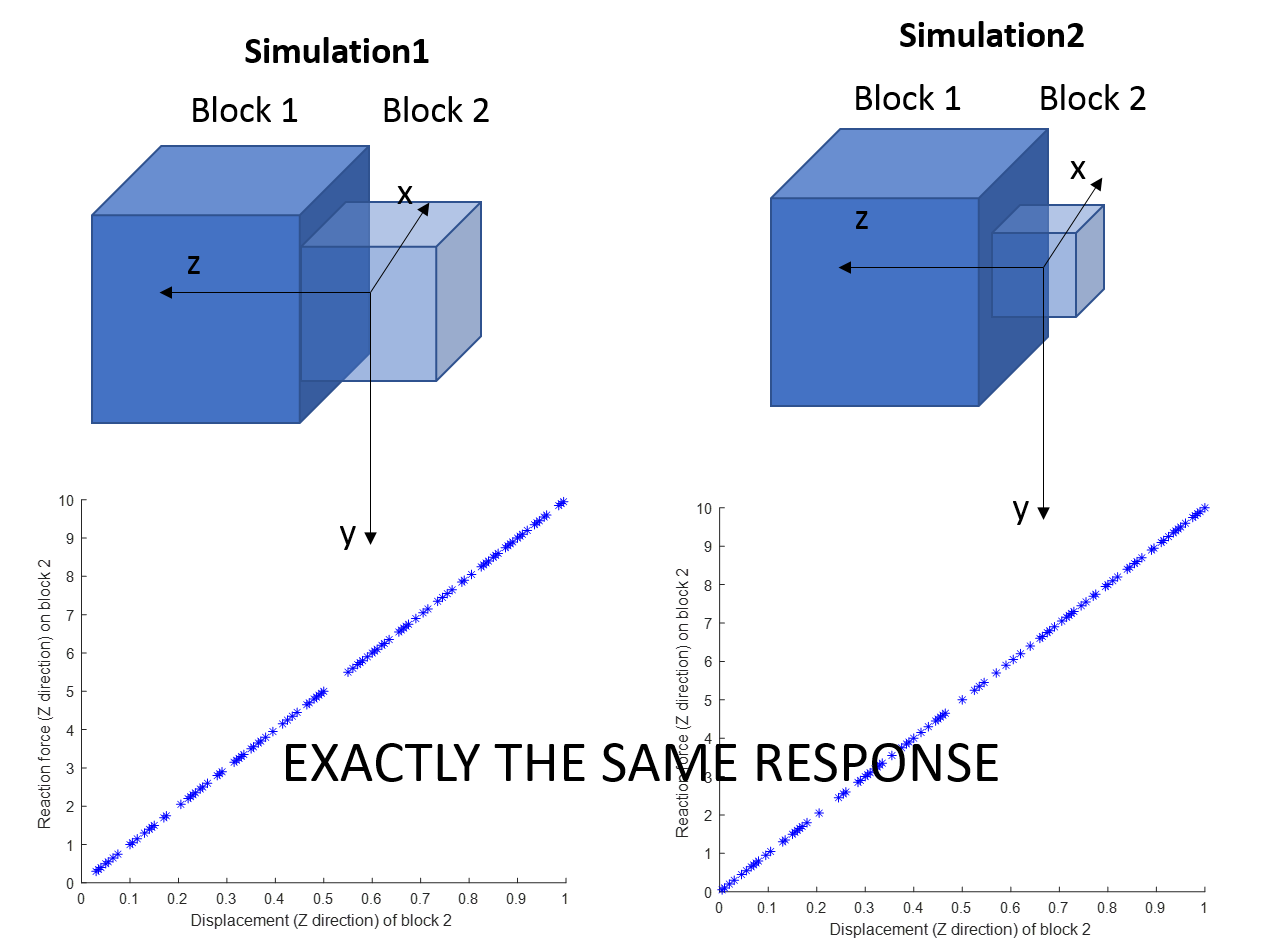
I am new to Granoo and I have a question regarding the contact algorithm embedded in Granoo. I ran two simulations (see picture below). In both simulations I have two blocks where Block 1 was completely fixed in all 6 degrees of freedom while block 2 was fixed in all 5 degrees of freedom but was moving in the z-direction towards block 1. The difference between both these simulations was the size of block 2 (it was much smaller in simulation 2).
The reaction force (in the z-direction) was plotted against the applied displacement (in the z-direction). For both the simulations, the force-displacement curves were exactly the same. Here is my question: Can I change the contact algorithm such that it accounts for the volume of penetration (of surface area of penetration) rather then just based on a distance? This way the reaction force will be different for both the simulations.
Currently I used the following line of code in the input file:
<PlugIn Id="_ManageCollision" Between="Body/Body" BroadPhase="AABBTree" NarrowPhase="WithShape" CallBack="Standard" Stiffness="1000000.000000000000" RestitutionCoeff="0.100000000000" RegularizationType="piecewise" DryFrictionSlope="1e5" StaticDryFrictionCoeff="0.3" DynamicDryFrictionCoeff="0.2" />
Thank you for your help! I really appreciate it.