Salut Granooers,
I have a observation. In the sample test exactly SmoothImpact I've done 2 simulations:
1. as is in example, discrete elements (DEs) in the ball and the base and during the contact the ball deflect. It is Ok. However,
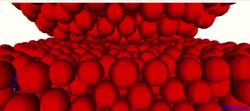
2. When I have ball discretized (with DEs) and the base is a tool (.off without DEs) during the contact the ball do not deflect. They have the same parameters only changed the tool.
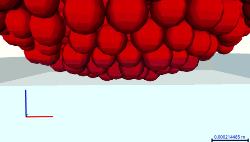
I've put a sensor in the base and detect forces but in the last do not deflect.
What is the reason?. In the contact is necessary DEs?. For the last case what do i got do in order to deflect the ball?. The idea is reduce computational cost and only to have discretized the ball because i want to analyze only the ball.
thanks
Luisalbert

